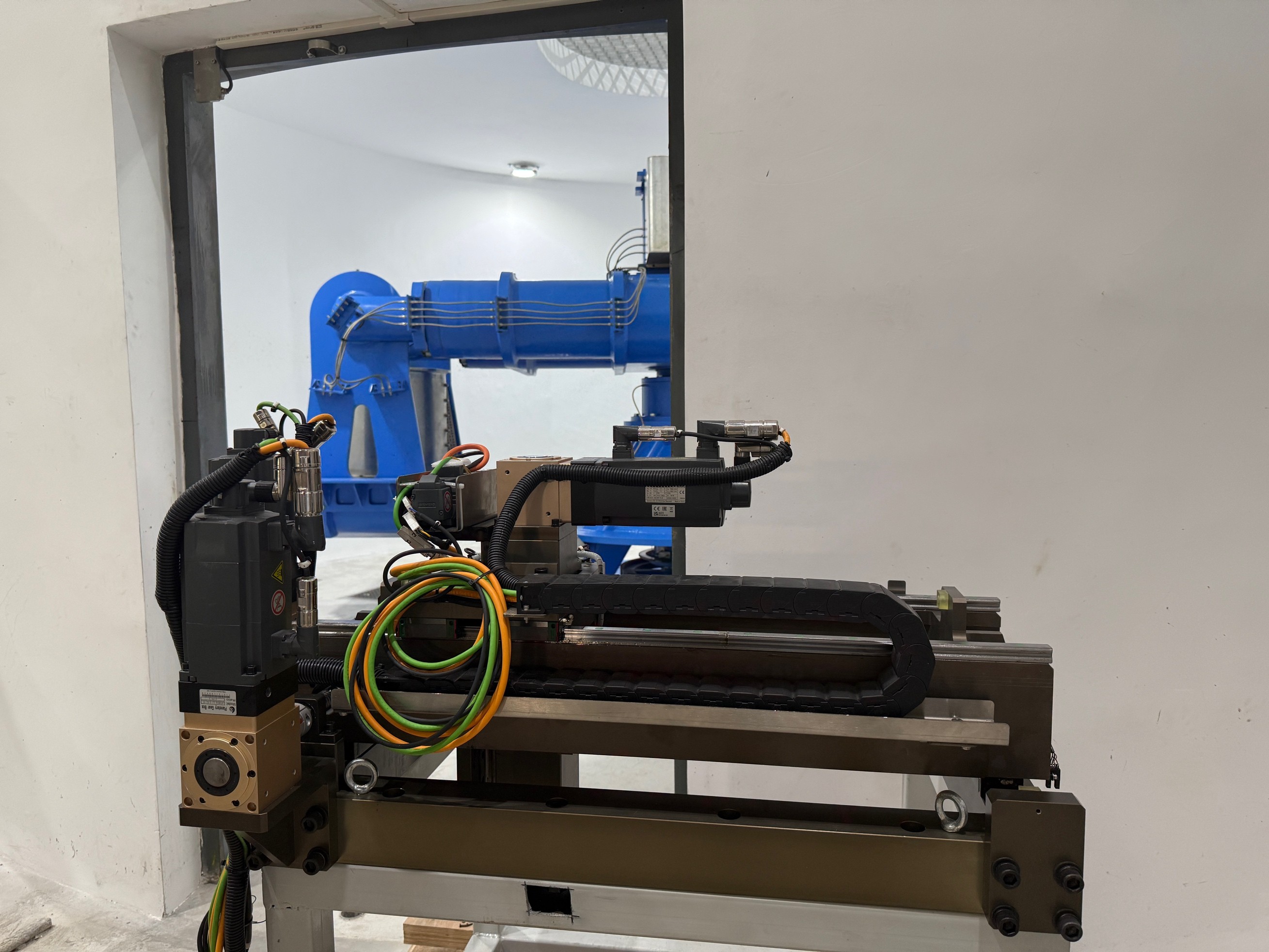
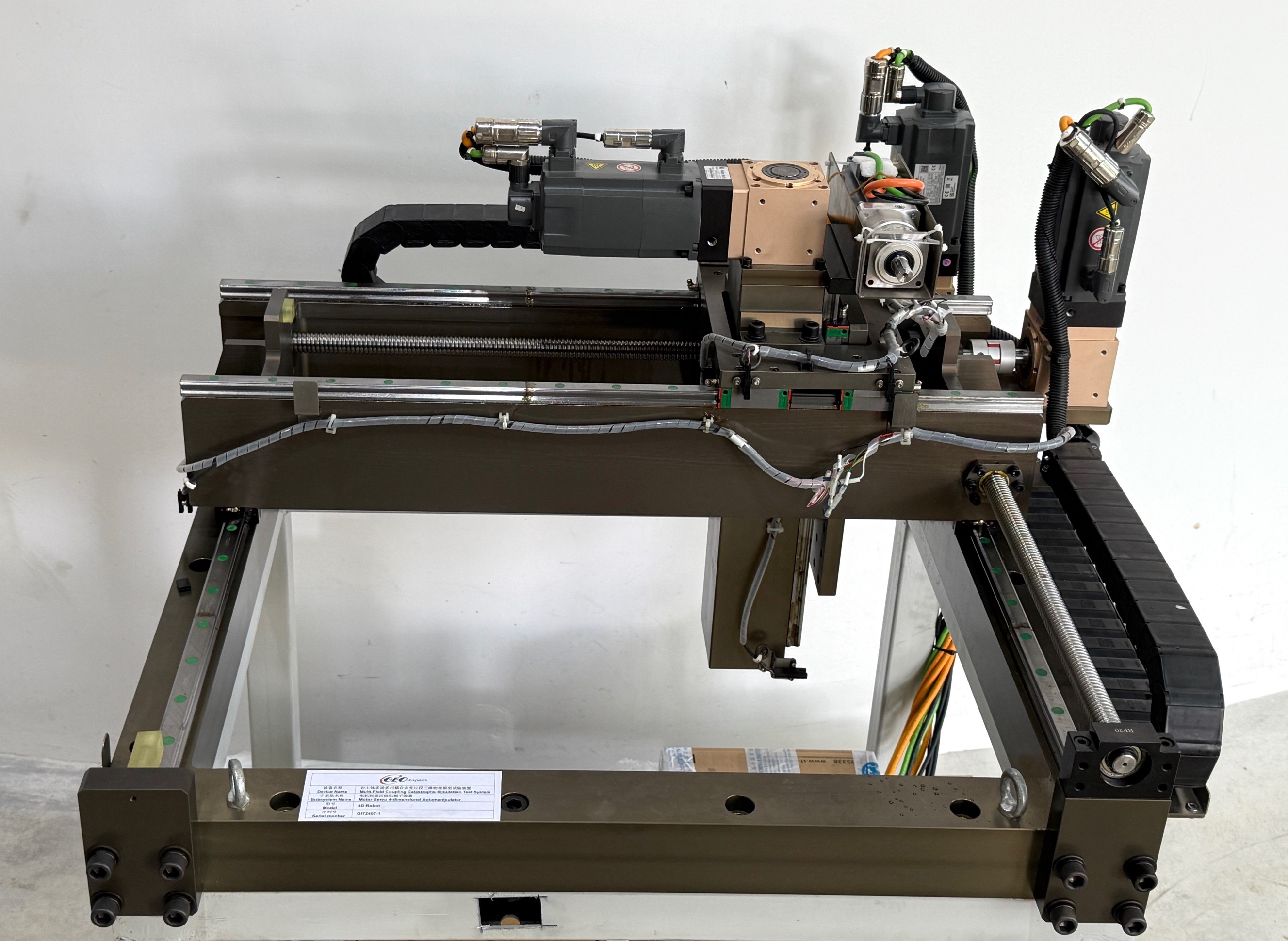
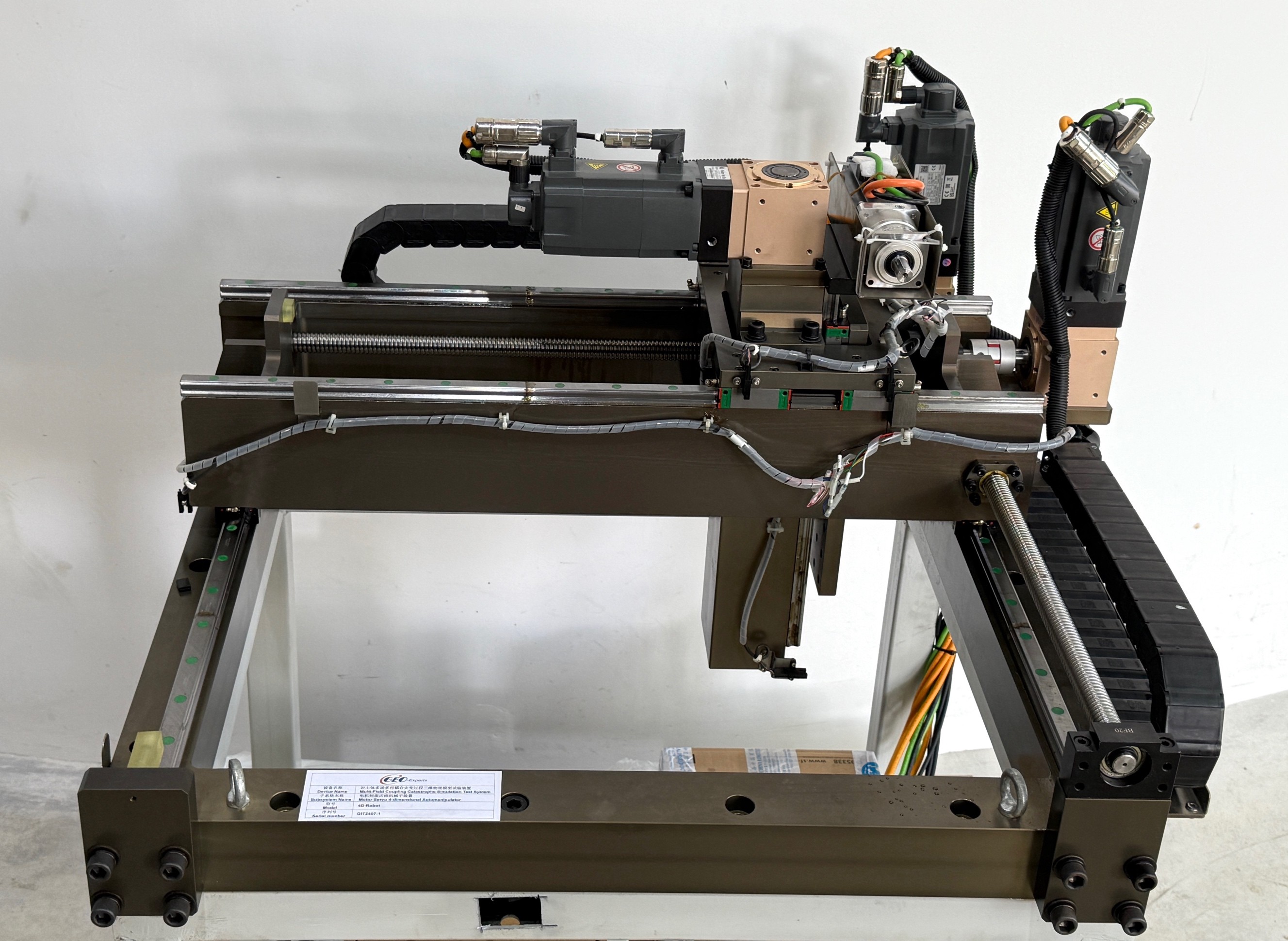
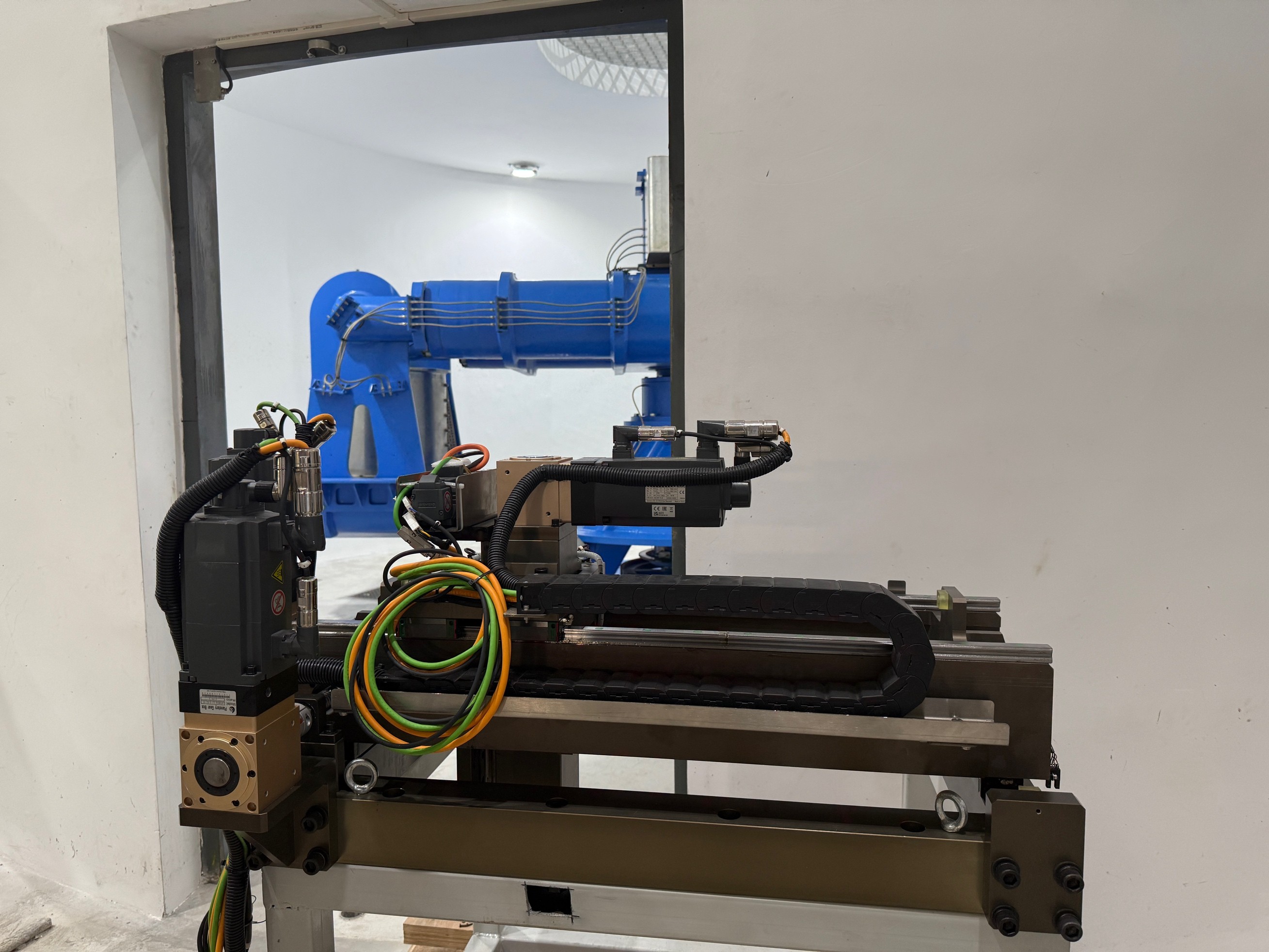
离心机四维机械手,机械手

机械手是在岩土离心机实验过程中模拟各种工程工况(比如打桩、压桩、拔桩,边坡支护、CPT静力触探勘测、各方向加载、钻孔等)的首要利器,在预先编好操作程序后,可以全自动执行各种规定动作,实现在线驱动有效载荷运动并进行有效工作。
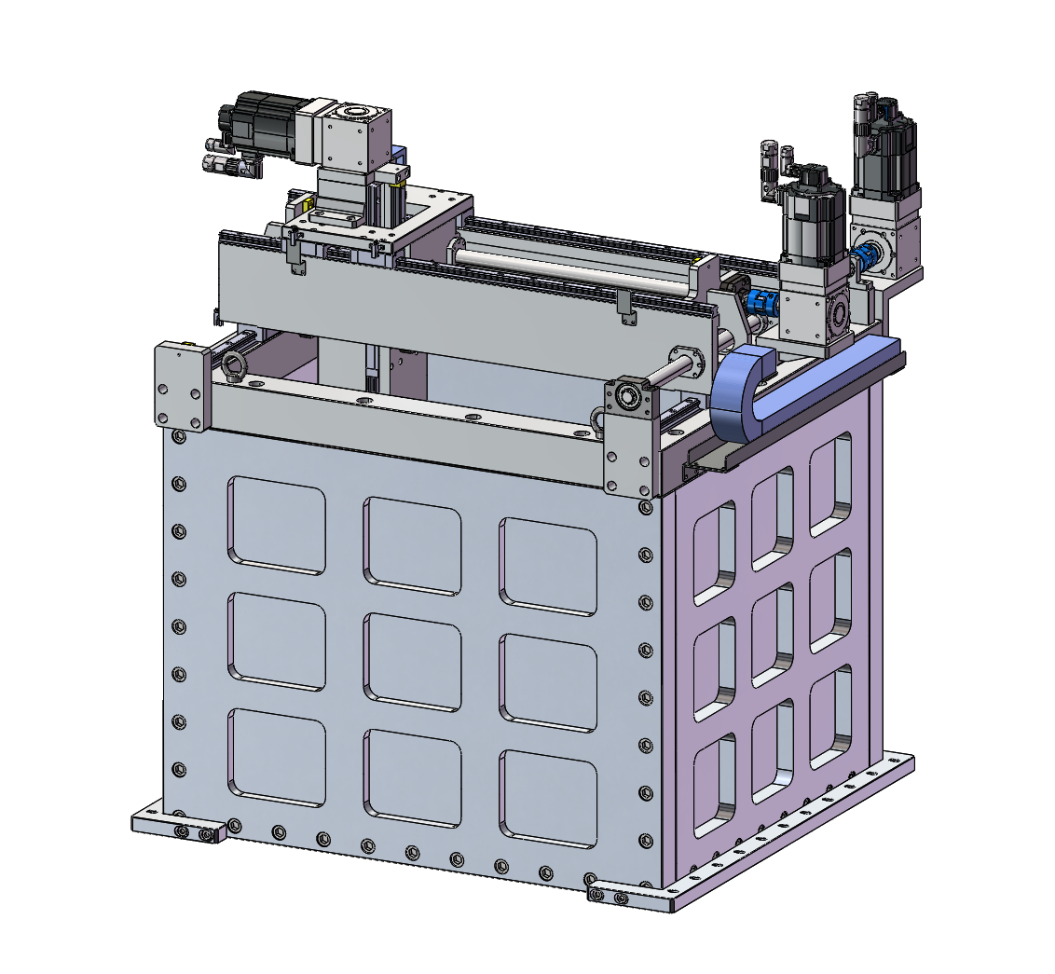
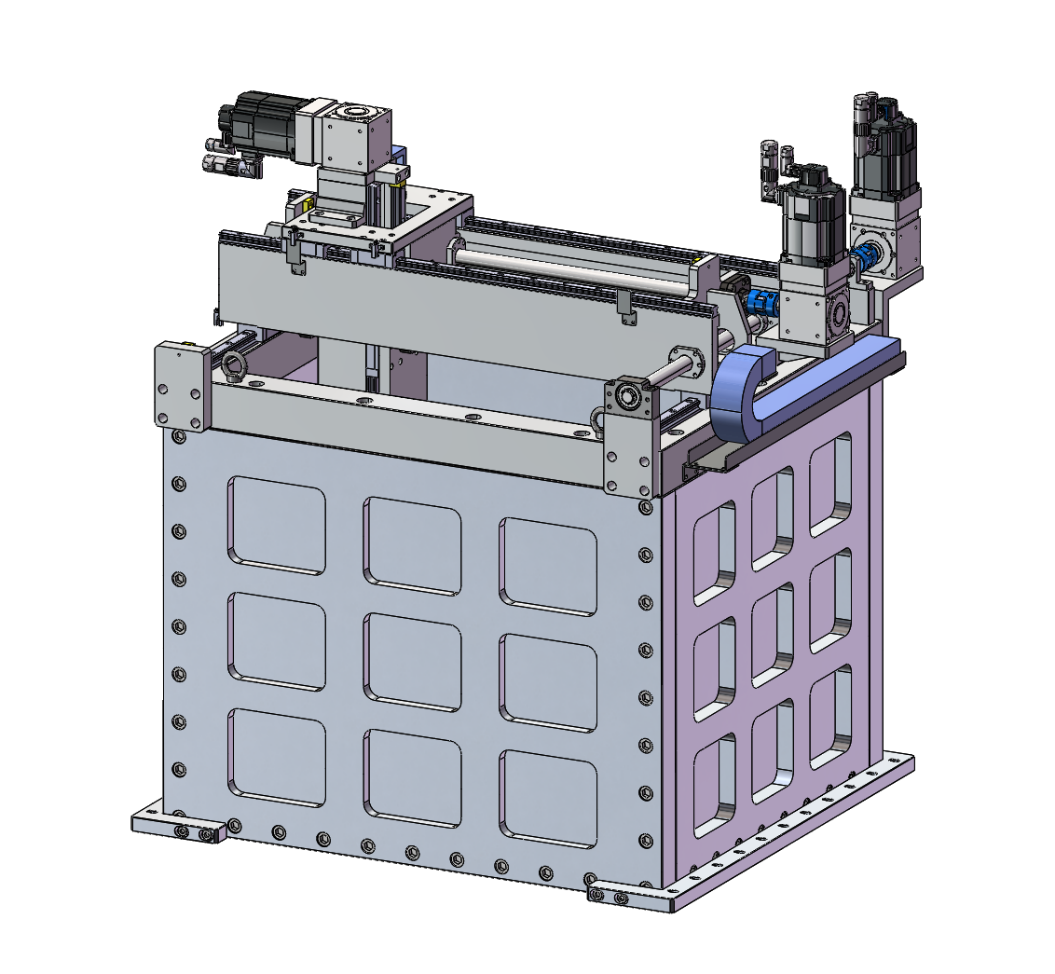
如下拟建的机械手是3+1自由度,可以在X、Y、Z三个方向自由运动,此外还增加了一个扭转自由度,装上相对应的刀具可以模拟钻孔、掘进等工况。
技术特点:
1. 四个自由度 X, Y, Z,θ
2. 设计重力环境:≥50g,也可按100g使用重力加速度设计
3. 每个自由度都是数字伺服控制,采用CAN总线链接
4. 带数字界面接口板的控制器和驱动器安装在离心机上,通过无线网络集线器控制机械手的数字伺服控制器
5. 直观而且易于操作的机械手控制软件
6. 交流伺服电机全部密封有效防止土颗粒和水汽进入
7. 操作方便性:机械手平台以及离心机随机控制器都采用快速拆卸方式设计,不使用的时候可以快速从离心机拆卸,延长机械手使用寿命。
岩土离心机四维机械手可在已有任意品牌的土工离心机上升级本系统。其他岩土离心机机载设备定制需求请咨询欧美大地。










